
衝床(chuáng)自(zì)動(dòng)機械手介紹
發(fā)布時間:2020-10-16 11:01:33 瀏(liú)覽:82次 責任編(biān)輯(jí):東莞蘑菇视频設備
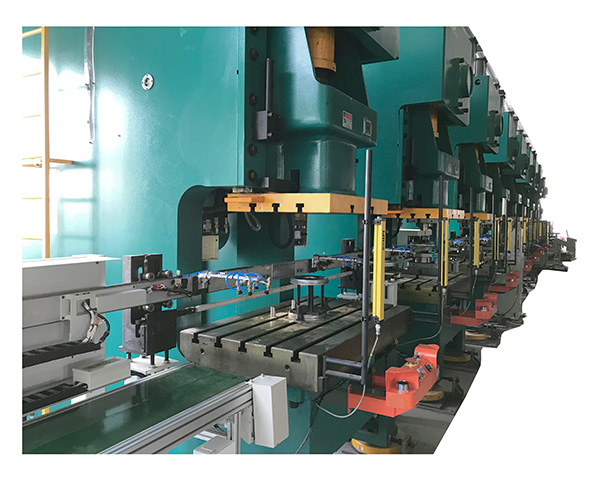
衝床(chuáng)自動機械手介紹,衝床機械手(shǒu)能按照預選程序自動(dòng)完成幾個(gè)規定的動作,實現物體的自動夾取(qǔ)和運送。在衝壓生產中,它不僅用於一台壓(yā)力機上完成上下料工作,實現單(dān)機自動化,也可(kě)以用在由若幹台壓力機組成的流水生產(chǎn)線上,實現各壓力機之間工件的自動傳遞,形(xíng)成自動衝壓生產(chǎn)線(xiàn)。機械手大幅(fú)度的增加了衝壓設備的工作效率,常見的衝床機械手的類型有四種,下(xià)麵我們來了解一(yī)下這四種衝床機械手的構成和原理。
機械手的驅動方式有氣動、液壓(yā)、電動和機械式四種。衝壓機械手多數為氣動或液(yè)壓驅動。
根據手臂運動形式的不同,機械手可以分為四種形式:擺臂式(shì)、連杆式、四(sì)軸式(shì)和六(liù)軸式(shì)。
1.擺(bǎi)臂式(shì)衝壓機械手:擺臂式衝壓機械手融合了關節式衝壓機器人的高自由度,以及連(lián)杆式衝壓機械手的高效穩定的雙重特性,控製比較靈活、使用操作簡單。
2.連杆(gǎn)式衝壓(yā)機械手:連杆式衝壓機械手是在同一條線體上它的鉛垂軸和水平軸都(dōu)通過杆(gǎn)連為(wéi)一體,所以在一條線體上其主(zhǔ)動電機(jī)隻有兩個,這使它的成本大大降低。連杆(gǎn)式衝壓機械手,夾板是與工件直接接觸的構件,在豎直(zhí)方向上夾持工件,夾板表麵始終保持與工件側表。
3.四軸衝(chōng)壓機械手:四軸衝壓機器人采用四軸設計,外形緊湊、體積(jī)小、重量輕、廣泛用於氬弧焊(hàn)接,碼垛,搬運,衝壓等領域,能(néng)完成穩定的搬運、精準的焊(hàn)接。四軸衝壓機械手能夠在狹小的空間內靈活的進行衝壓作業,安裝調試簡單方(fāng)便。
4.六軸衝(chōng)壓機械手:六軸衝壓機械手有6個自由度,動作靈活、運動慣性小、通(tōng)用性強、能抓取靠近機座的工(gōng)件,並能繞過機體和工作機械之間的障礙(ài)物(wù)進行工作.隨著生產(chǎn)的(de)需要,對(duì)多(duō)關節手臂的靈活性,定位精(jīng)度及作業空間等提出越來越高的要(yào)求。
衝壓機械手(shǒu)在自動化設備的基(jī)礎上,根據衝壓生產特點,專門為實現衝壓自動化無人(rén)生產而研發的設備。能取代人工在各(gè)個(gè)衝壓工位上進行物料衝壓(yā)、搬(bān)運、上(shàng)下料等工作,整(zhěng)條生產(chǎn)線效率達到5秒。以上是蘑菇视频設備(bèi)為大家分享的“衝床自動機械手介(jiè)紹”內容,希望能夠幫助到大家。
