
衝壓機械手(shǒu)的(de)工作原理
發布時間:2020-09-15 17:57:19 瀏覽:76次(cì) 責(zé)任(rèn)編(biān)輯:東莞蘑菇视频設(shè)備
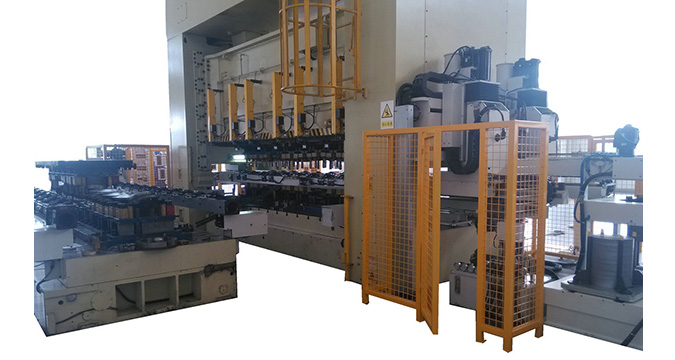
衝壓機械手的工作原理,衝(chōng)壓機械手是應用於衝床設(shè)備替代人工進行工(gōng)作的機械手,實踐證(zhèng)明,衝壓機械手可以代替人手的繁重勞動,顯著(zhe)減輕工人的勞動強度,改(gǎi)善勞動條件,提高勞動生產率(lǜ)和自動(dòng)化水平。工業生產中經常出現的笨重工件的搬運和長期頻繁、單(dān)調的操作,采用衝床機械手是有效的。此外,它能在高溫、低溫、深水、宇宙、放射(shè)性和其他有毒、汙(wū)染環境條件(jiàn)下進行操作,更顯示其優越性。下麵我們來了解一(yī)下衝(chōng)壓(yā)機械手的(de)工作原理:
按驅動方式可分為液(yè)壓式、氣動式、電(diàn)動式、機械式機械手。
一、機械手氣壓定(dìng)位工作原理
氣壓傳(chuán)動機械手是以空氣為主要動力源,通過氣壓裝置來驅動機械手運動的。其(qí)優點是:結構簡單,動作迅速,成本低,動力源環保無汙染。缺點是:定位(wèi)衝擊(jī)大,速度穩定性差,抓取力小。因(yīn)此(cǐ)適用(yòng)於(yú)高速(sù)度、小負載的(de)場合。下麵以衝(chōng)床機械手為例,介紹機(jī)械手的氣壓定位方式。
衝床就是一台衝壓式壓力機(jī)。在國民生產中,衝壓工藝由於比較傳統機械加工來說有節約材料和能源,效率高,對操作者技術要求不高及通(tōng)過各種模具應(yīng)用可以做出機械加(jiā)工所無(wú)法達到的(de)產品這些(xiē)優點,因而它(tā)的用途越來越廣泛。但衝床的人工操作比較危險,工(gōng)作環境噪音大,危險性高,所以適(shì)合使(shǐ)用機械手來實現自動化衝壓。
衝壓機械手最需要解決的問(wèn)題就是如何將(jiāng)材料精確放到模具內,所以,材料定位方式顯得最(zuì)為重要。我們通過(guò)三個方麵(miàn)來保證材料定位精準:
1.通過氣動裝置不斷拍打材料是之到達精準的工作位(wèi)置。材料在自動(dòng)升(shēng)降機內,左上角是固(gù)定的定位(wèi)邊,右下角有氣動(dòng)定(dìng)位裝置,不斷拍打材料。
2.采用伺服電機驅動,重複運動精度是0.08mm,保證連續運動位置的精準。
3.衝壓模具(jù)內設置錐形定位柱(zhù),材料(liào)放到模具(jù)後,可以導向,讓位置精準。
二、機械手液(yè)壓定位(wèi)工作原理
液壓傳動機械手是以液體壓力為主要動力源,通過液壓裝置來驅動機械手運動的。其優點是:結(jié)構緊湊,動作靈敏,運動平穩(wěn),抓取力大。缺點是(shì):對密封(fēng)裝(zhuāng)置的要求十(shí)分(fèn)嚴格,由(yóu)於油溫的敏感性,不宜用於溫度過高或過低的場合,並且成本較高。由於上述不足,通常(cháng)采用電液伺服閥來實現(xiàn)連(lián)續軌跡控製,從而獲得良好的(de)定位精(jīng)度。
我們可以簡單(dān)的理解衝床機械手其工作過程為:當貨物(wù)到(dào)達時,機械手係統開始動作;步進(jìn)電機控製(zhì)開始向下運(yùn)動,同時另一(yī)路(lù)步(bù)進電機(jī)控製(zhì)橫軸開始向前運(yùn)動;伺服電機驅動機械(xiè)手旋轉到達正好抓取貨物的方位處,然後充氣,機械手夾住貨物。
